
This page describes my research on mathematical
methods for controlling
marine robots. It includes faculty and undergraduate and graduate student research. It began as a collaboration with Professor Fumin Zhang
from the Georgia Tech School of Electrical and Computer Engineering, and currently involves
Dr. Corina Barbalata from the LSU College of Engineering and Zhong-Ping Jiang from NYU.
It includes
mathematical control theory, numerical simulations,
and real time experimental field work using actual marine robots.
The
long term objectives are to develop marine robotic methods that are
adaptive, fault tolerant, repeatable, robust to
uncertainty, and scalable to heterogeneous fleets of autonomous underwater
vehicles. Marine robots are useful because of the hazards and high costs
associated with conventional human-based marine
surveys. The methods from my projects retrieved water and
sediment samples, to help monitor the long term impacts of environment disasters,
hazards, and stresses.
The projects began in
September 2010, in response to the Deepwater Horizon oil spill disaster in the Gulf
of Mexico. This included 3 weeks of
field work at Grand Isle, Louisiana during the summer of 2011, in a region
that was heavily polluted by the oil spill.
A total of 14 students worked on the project, including 9 undergraduates.
Ten were members of the Georgia
Tech Savannah Robotics Team, 3 were from the College of William and Mary,
and 1 was from LSU.
The field work used several robotic vehicles, including
2 that were built by the Georgia Tech team. Georgia Tech used their
surface vehicle Victoria, and their underwater vehicle ROV Beta.
Mark Patterson from the Virginia Institute of
Marine Science used two versions of his underwater vehicle Fetch.
The water and sediment samples from Grand Isle were
checked for contaminants by Prof. Ed
Overton from the LSU School of the Coast and Environment, and the research
produced crude oil concentration maps.
The students benefited
from hands on training involving cutting edge control research that would
not otherwise have been available.
Our current work aims to better understand how to compensate for
communication constraints and delays, which result from unfriendly sea conditions.
Our techniques involve
Lyapunov-Krasovskii functionals, nonlinear tracking controllers,
input constraints, robust forward
invariance, and event-triggered control. Event-triggered control differs from standard
control methods because it calls for only changing control values when a significant
event occurs. Our current work studies the benefits of replacing traditional event trigger mechanisms
by novel mechanisms that use interval observers and linear Lyapunov functions. These benefits include reduced need
to change control values without adversely affecting overshoots, undershoots, or settling times.
The research can help protect marine ecosystems by
improving responses to hazards such
as oil spills, and can help with industrial and military applications that call for remotely operated or autonomous marine vehicles. Here are the vehicles used in the Grand Isle field work:
 From left to right, they are VIMS Fetch 3.5,
the YSI Ecomapper (a commercial vehicle), ASV-Victoria, ROV-Beta, and
VIMS Fetch 1. Click here for an
enlarged photo of the vehicles. Here is a
crude oil concentration map that was generated by the projects:
From left to right, they are VIMS Fetch 3.5,
the YSI Ecomapper (a commercial vehicle), ASV-Victoria, ROV-Beta, and
VIMS Fetch 1. Click here for an
enlarged photo of the vehicles. Here is a
crude oil concentration map that was generated by the projects: 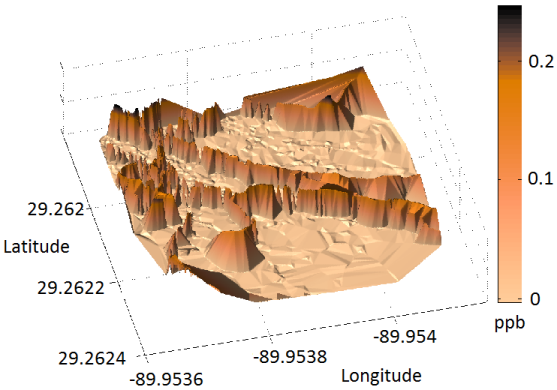 Here are publications that were sponsored in part by our projects. The people whose names are
underlined were students when the paper was written. Clicking on their titles links to downloadable versions from the publishers' websites.
Here are publications that were sponsored in part by our projects. The people whose names are
underlined were students when the paper was written. Clicking on their titles links to downloadable versions from the publishers' websites.
- Alyahia, S., C. Barbalata, M. Malisoff, and F. Mazenc, "Dynamic event-triggered control of linear
continuous-time systems using a positive systems approach," Nonlinear Analysis: Hybrid Systems,
Volume 54, November 2024, Article 101508.
-
Malisoff, M., F. Mazenc, and C. Barbalata, "Event-triggered control under unknown input and unknown measurement delays using interval observers,'' IEEE Control Systems Letters, Volume 7, 2023, pp. 823-828.
-
Mazenc, F., M. Malisoff, C. Barbalata, and Z.-P. Jiang, "Subpredictor approach for event-triggered control
of discrete-time systems with input delays," European Journal of Control, 2022, Article 100664.
- Zuo, W., A. Chakravarthy, M. Malisoff, and Z. Chen, "Event-triggered control of robotic fish with reduced communication
rate," IEEE Robotics and Automation Letters, Volume 7, Issue 4, 2022, pp. 9405-9412.
-
Mazenc, F., M. Malisoff, and C. Barbalata, "Event-triggered prediction-based delay compensation approach," IEEE Control Systems Letters, Volume 6, 2022, pp. 2515-2520.
- Mazenc, F., M. Malisoff, C. Barbalata, and Z.-P. Jiang, "Event-triggered control for time-varying systems
using a positive systems approach," Systems and Control Letters, Volume 161, March 2022, Paper 105131.
- Mazenc, F., M. Malisoff, C. Barbalata, and Z.-P. Jiang, "Event-triggered control for discrete-time systems
using a positive systems approach," IEEE Control Systems Letters, Volume 6, 2022, pp. 1843-1848.
-
Mazenc, F., M. Malisoff, and C. Barbalata, "Event-triggered control for continuous-time linear systems
with a delay in the input," Systems and Control Letters, Volume 159, January 2022,
Paper 105075.
- Mazenc, F., M. Malisoff, C. Barbalata, and Z.-P. Jiang, "Event-triggered control for systems with state
delays using a positive systems approach," in Proceedings of the 60th IEEE Conference on Decision and Control, 2021, pp. 552-557.
- Mazenc, F., M. Malisoff, C. Barbalata, and Z.-P. Jiang, "Event-triggered control using a positive systems
approach," European Journal of Control, Volume 62, 2021, pp. 63-68.
- Malisoff, M., R. Sizemore, and F. Zhang, "Adaptive planar curve tracking control and robustness analysis
under state constraints and unknown curvature," Automatica, Volume 75, 2017, pp. 133-143.
- Malisoff, M., R. Sizemore, and F. Zhang, "Robustness of adaptive
control for three-dimensional curve tracking under state constraints:
effects of scaling control terms," in Proceedings of the 55th IEEE
Conference on Decision and Control (Las Vegas, NV, 12-14 December 2016),
pp. 3825-3830.
- Malisoff, M., and F. Zhang,
"Adaptive planar curve tracking control with unknown curvature,"
in
Proceedings of the
2016 American Control Conference (Boston, MA, 6-8
July 2016), pp. 1608-1612.
- Malisoff, M., and F. Zhang, "Robustness of adaptive
control under time delays for
three-dimensional curve tracking,'' SIAM Journal on Control
and Optimization, Volume 53, Number 4, 2015, pp. 2203-2236.
- Mukhopadhyay, S., C. Wang, M. Patterson, M. Malisoff,
and F. Zhang, "Collaborative autonomous surveys in
marine environments affected by oil spills," in
Cooperative Robots
and Sensor Networks 2014,
A. Koubaa and A. Khelil, Eds.,
Studies in Computational Intelligence Series Vol. 554, Springer, New York, 2014, pp. 87-113.
- Malisoff, M., and F. Zhang, "An adaptive control
design for 3D curve tracking based on robust forward invariance,"
in
Proceedings of the
52nd IEEE Conference on Decision and Control (Florence, Italy, 10-13 December 2013), pp. 4473-4478.
- Malisoff, M., and F. Zhang, "Robustness of a
class of three-dimensional curve tracking control laws under time delays
and polygonal state constraints,'' in Proceedings of the
American Control Conference (Washington, DC, 17-19 June 2013), pp.
5690-5695.
- Malisoff, M., and F. Zhang, "Adaptive control for planar
curve tracking under controller uncertainty,'' Automatica, Volume 49, Issue 5, May 2013, pp. 1411-1418.
- Malisoff, M., and F. Zhang, "Adaptive controllers and robustness
analysis for curve tracking with unknown control gains,"
in Proceedings of the
2012 American Control Conference (Montreal, Canada, 27-29 June 2012),
pp. 344-349.
- Malisoff, M., F. Mazenc, and F. Zhang, "Stability and robustness analysis for curve tracking control using input-to-state stability,"
IEEE Transactions on Automatic Control, Volume 57, Issue 5, May 2012, pp. 1320-1326.
- Malisoff, M., F. Mazenc, and F. Zhang, "Input-to-state stability
for curve tracking control: A constructive approach," in
Proceedings of the 2011 American
Control Conference (San Francisco, CA, 29 June-1 July 2011), pp. 1984-1989.
The preceding works were sponsored in part by the US National Science Foundation
Division of Electrical, Communications and Cyber Systems
Energy, Power, and Adaptive Systems Program and Division of Mathematical Sciences
Applied Mathematics Program
under grants
1056253,
1056255,
1102348,
2009644, or
2009659. Here are links to home pages for
some of the project participants and their co-authors:
- Valerie Bazie
- Steve Bradshaw
- Lisa Hicks
- Michael Malisoff
- Shayok Mukhopadhyay
- Mark Patterson
- Chuanfeng Wang
- Fumin Zhang
Three MS students (Lisa Hicks, Valerie Bazie,
and Steve Bradshaw) and one undergraduate (Michael Bunch) who worked on
the projects went on to work for Toyota or General Motors. Here
are links to news reports about the projects and their participants:
- May 31, 2023 Fumin Zhang
Semi-Plenary
- April 2011 Poster
- One Minute YouTube
Video
- Six Minute YouTube Video
- LSU Gold Article
- LSU
College of Science News
- Georgia Tech ECE Report
- January 2012 Baton Rouge Advocate Article
- LSU Mathematics News
- WSB
Report
- WOKV Report
- WJAC-TV Report
- Times Union Article
- Vicksburg Post Article
- Houston Chronicle
Article
- Beaumont Enterprise Article
- San Antonio Express-News Article
- Mashable Article
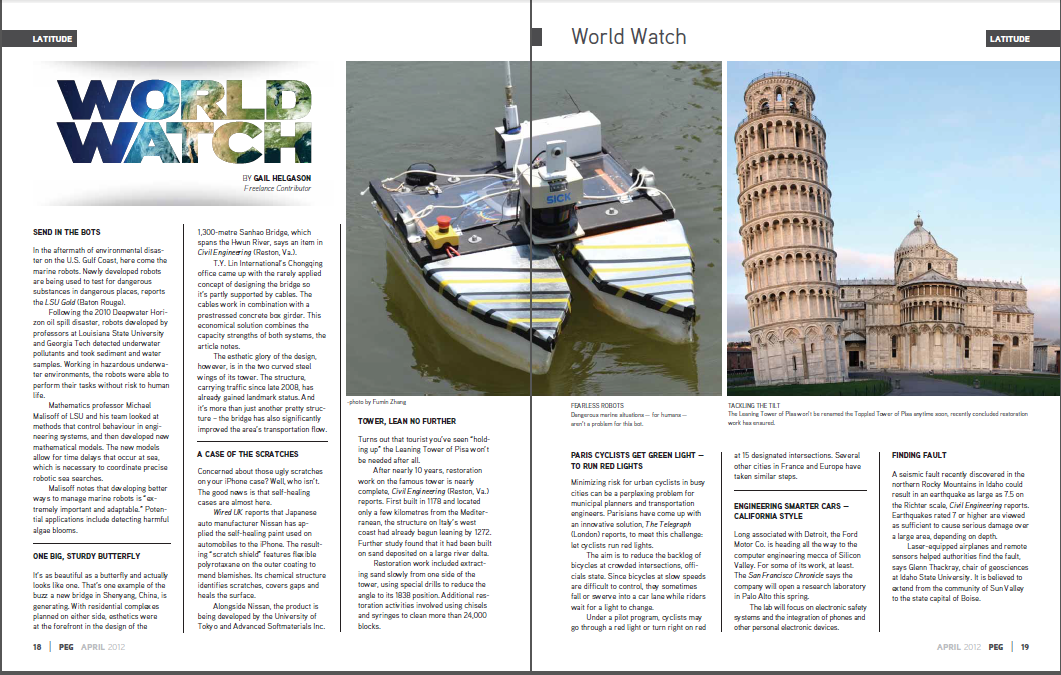
- April 2012 Pursuit Article
- April 2012 APEGGA Peg Article
- LSU College of Science Strategic Plan
- February 2013 LSU Media Center News
- May 2013 Pursuit Article
- June 2013 SEE Innovation Research.gov Report
- March 2014 Rainmaker Award
- April 2014 College of Science E-News
- ASV-Victoria "Robots For Good" Poster
- Summer 2014 LSU Alumni Magazine
- August 2014 CMMI and EPCN Announcement
- Fall 2014 LSU ORED Magazine Article
- September 24, 2020 NYU Tandon News Report
- 2020 Linkedin Research Grant Announcement
- September 27, 2021 LSU Reveille
Article and
Tweet
- Issuu Version of September 27, 2021 Reveille Article
- 2021 LSU College of Science Annual Report Pursuit Article
-
January 2022 LSU Mathematics Research Announcement
- February 2022 LSU College of Engineering Research Announcement
- March 2022 LSU College of Engineering Underwater Exploration Article
- WCMU Radio Article about Field Work in Great Lakes
- WBKB TV Article about Field Work
Thank you
for
your interest in our projects! |


{kind=link}
{kind=link}
{kind=link}
{kind=link}